|
Christina Dao Wen Lee I'm a PhD Candidate and Graduate Tutor at National University of Singapore (Mechanical Engineering) and Advanced Robotics Centre (ARC). I am supervised by Prof Marcelo Ang and Dr Zhang Hongying. Research Keywords: Sensor Fusion, Robot Vision, Machine Learning, Visual Place Recognition, Object Detection, Segmentation Scene Understanding, Radar |

|
Research
I'm interested in multi-sensor fusion for object detection and visual place recognition. I also research on techniques for optimising performance and speed for real-world implementations on various platforms.
|
|
DINO-CoDT: Multi-class Collaborative Detection and Tracking with Vision Foundation Models Xunjie He* ,Christina Dao Wen Lee* , Meiling Wang, Chengran Yuan, Zefan Huang, Yufeng Yue†, Marcelo H Ang Jr Under Review paper DINO-CoDT, a novel framework for collaborative detection and tracking in complex multi-class autonomous driving scenarios.Through extensive experiments on V2X-Real and OPV2V benchmark, DINO-CoDT demonstrates significant improvements in both detection and tracking accuracy. |
|
AGI-Elo: How Far Are We From Mastering A Task? Shuo Sun†, Yimin Zhao, Christina Dao Wen Lee , Jiawei Sun, Chengran Yuan, Zefan Huang, Dongen Li, Justin KW Yeoh, Alok Prakash, Thomas W. Malone, Marcelo H. Ang Jr. NeurIPS 2025 project page | paper AGI-Elo, we address these challenges by introducing a unified rating system that provides fine-grained difficulty estimates for every individual test case, along with difficulty-anchored competency ratings for AI models. For the first time, this allows us to evaluate how difficulty distributions — especially the long tail — vary across datasets and tasks, and to measure the gap between today’s strongest models and the inherent difficulty of tasks. AGI-Elo offers a new perspective for assessing the true performance and trustworthiness of AI across domains.
|

|
DINO-MOT: 3D Multi-Object Tracking With Visual Foundation Model for Pedestrian Re-Identification Using Visual Memory Mechanism Min Young Lee†, Christina Dao Wen Lee, Jianghao Li, and Marcelo H. Ang Jr RAL 2024 , ICRA 2025 paper
|

|
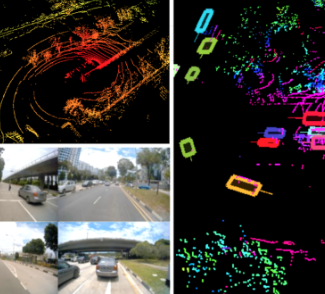
ARC-BEV: Attentive Radar-Camera fusion 3D object detection in Bird-Eye-View space for autonomous driving Lyuyu Shen†, Jianghao Li, Christina Dao Wen Lee, Min Young Lee, Andreas Hartmannsgruber and Marcelo H. Ang Jr ISER 2023
In this paper, we propose a straightforward and efficient fusion framework for camera and radar in BEV space.
|

|
Hot-NetVLAD: Learning discriminatory key points for visual place recognition Zhikai Li, Christina Dao Wen Lee†, Beatrix Xue Lin Tung, Zefan Huang, Daniela Rus, Marcelo H Ang RAL, 2023 paper Hot-NetVLAD implements a hot-spot detector on a learned local key-patch descriptor algorithm for Visual Place Recognition (VPR), thereby greatly cutting down the size of features extracted. Furthermore, identified hot-spots bring new insights to key regions required for VPR, as they tend to fall on distinguishable static objects in the scene. |
|
Online obstacle trajectory prediction for autonomous buses Yue Linn Chong*, Christina Dao Wen Lee*†, Liushifeng Chen, Chongjiang Shen, Ken Kok Hoe Chan, Marcelo H Ang Jr Machines, 2022 Feature Paper SGAB Dataset / paper
In this paper, we present the development of a modular pipeline for the long-term prediction of dynamic obstacles’ trajectories for an autonomous bus. Our Singapore autonomous bus (SGAB) dataset evaluated the pipeline’s performance. The dataset is publicly available online.
|
Academic ServiceReviewer Activities
· Robotics: Science and Systems (RSS) Volunteer· IEEE RAS Technical Committee Computer & Robot Vision, Student Representative· International Symposium on Experimental Robotics (ISER) 2023 - Admin |